
在高程应用方面GPS可以直接精确测定测站点的()A、大地高B、正常高C、水准高D、海拔高
题目
在高程应用方面GPS可以直接精确测定测站点的()
- A、大地高
- B、正常高
- C、水准高
- D、海拔高
相似考题
更多“在高程应用方面GPS可以直接精确测定测站点的()”相关问题
-
第1题:
工程高程控制网的施测方法可以采用()。A:水准测量
B:三角测量
C:三角高程测量
D:导线测量
E:GPS水准方法答案:A,C,E解析:工程高程控制测量的施测方法有:几何水准测量、三角高程测量、GPS水准测量方法等。选项B、D(三角测量、导线测量),属于平面控制测量方法。故选ACE。 -
第2题:
下面关于GPS控制网的叙述正确的是()。A:GPS控制网按精度可分为一、二、三、四等
B:利用GPS可建立国家高程控制网
C:直接以测图为目的建立的控制网,称为GPS图根控制网
D:利用GPS技术建立的控制网,称为GPS网
E:GPS网中各控制点可以不相互通视答案:C,D,E解析:GPS网按精度可以分为A、B、C、D、E五级,国家控制网按精度可分为一、二、三、四等,故A不对。GPS测量的是大地高,需进行水准拟合得到正常高,可以代替四等水准测量,国家一、二等水准网还必须用水准测量,故B不对。GPS要求测站对天空视野开阔,各控制点可以不相互通视,如果为了工程应用,则需要考虑各控制点相互通视。故选CDE。 -
第3题:
某测绘单位承担了某测区基础控制测量工作,测区面积约1800km2,地势平坦,无CORS网络覆盖。工作内容包括10个GPS C级点GPS联测、三等水准连测及建立测区高程异常拟合模型,测量基准采用2000国家大地坐标系(CGCS2000)及1 985国家高程基准。
测区已有资料情况:测区周边均匀分布有3个国家GPS B级框架点,一条二等水准路线经过测区。
观测设备采用经检验合格的双频GPS接收机(5mm+1ppm)3台套,DS1水准仪1套。
技术要求:GPS C级网按同步环边连接式布网观测;按照三等水准连测GPS C级点高程;
采用函数f(χ,y)=a0+a1x+a2y+a3χ2 +a4 y2+a5χy计算测区高程异常拟合模型。
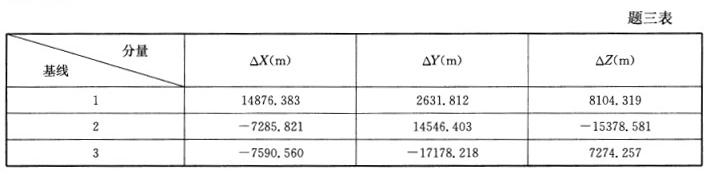
经GPS观测、水准连测及数据平差处理,获得了GPS C级点的CGCS2000坐标及1985高程成果。某GPS三边同步环各坐标分量情况统计见表。
拟合方法:利用GPS C级成果计算测区高程异常拟合模型。经检验精度为±0.05m。
问题:
1.本工程共能建立几个同步环?计算本工程的独立基线数有几条?
2.根据本项目给出的某同步环给出的数据(见表)计算各坐标分量残差与同步环闭合差。
3.简述测区高程异常拟合模型的建立过程,如何检验本项目高程异常拟合模型的精度?
答案:解析:1.本工程共需建立几个同步环?计算本工程的独立基线数有几条?
答:由题意,GPS控制点数n=10+3,接收机数k=3。 3台接收机只能构成一个简单的三角形同步图形,边连接是指相邻的同步图形间有一条边(即两个公共点)相连,3台GPS接收机为了完成C级测量,至少要构成v=8个同步图形,两个同步图形有u=2个公共点,全网观测时段数C=11;基线向量总数J总=C*k*(k-1)/2=33条;独立基线向量数J独=C*(k-1)=1 1*2=22条。
2.根据本项目给出的某同步环给出的数据(见表)计算各坐标分量残差与
同步环闭合差。
答:各坐标分量残差:
Wχ=14876. 383+(-7285. 821)+(-7590. 560)=-0.002m
Wy=2631.812+14546. 403+(-17178. 218)=-0.003m
Wz=8104. 319+( -153 78. 581) +7 274. 25 7=-0.005m
同步环闭合差:

3.简述测区高程异常拟合模型的建立过程,如何检验本项目高程异常拟合
模型的精度?
答:(1)测区高程异常拟合模型的建立过程:
①选点:
选取n个(n一般要求大于待估参数个数,本题待估参数为6)在测区内分布
合适的公共点(同时具有三等水准高程和GPS大地高的点)。设各点数据为(χi,yi,Hi,hi,其
中i=1,2,…,n),H为大地高,h为水准高程。
②坐标重心化:
计算重心坐标:
 ,其中i=1,2,…,n
,其中i=1,2,…,n
公共点坐标重心化:
 ,其中i=1,2,…,n
,其中i=1,2,…,n坐标重心化的目的是提高计算精度(注:坐标重心化不是必须要做的)。
③计算高程异常:
计算公共点高程异常:ξi=Hi-hi,其中i=1,2,…,n
④建立误差方程:
按公式
 建立误差方程,v为改
建立误差方程,v为改正数。
应用最小二乘原理计算得到待估参数aj的估值
 (其中j=1,2,…,6)。
(其中j=1,2,…,6)。⑤建立拟合模型:
测区待定点k的高程异常按以下模型计算:

拟合的水准高程为:

(2)检验本项目高程异常拟合模型的精度:
①按上述似大地水准面模型计算的各检验点高程异常ξ计与其实测高程异常ξ测计算高
程异常不符值△(△=ξ计-ξ测);
②计算高程异常不符值的中误差,作为似大地水准面精度检验。
(3)求取参与拟合的联测点拟合后的中误差,可得内符合精度,将检核点代入模型计算,求
取得到的中误差即为外符合精度。
-
第4题:
在GPS高程应用方面,以下说法正确的是()
- A、GPS直接得到的是大地高
- B、高程精度比平面精度差
- C、GPS高程拟合的目的是为了得到正高
- D、GPS高程加上高程异常为正常高
正确答案:A,B,D -
第5题:
对于采用GPS-RTK测图的测区,在控制网的布设中不必顾及参考站点的分布及位置。
正确答案:错误 -
第6题:
GPS网一般是求得测站点的三维坐标,其中高程为()高,而实际应用的高程系统为()高系统。
正确答案:大地;正常 -
第7题:
测设己知高程点是指()。
- A、根据己有水准点高程,测定待测点高程
- B、测定两固定点间高差
- C、根据己有水准点高程,测设出给定的高程的标志
- D、测定视线高程
正确答案:C -
第8题:
利用GPS直接测定的高程是GPS点在WGS-84坐标系中的()高。
正确答案:大地 -
第9题:
填空题GPS网一般是求得测站点的三维坐标,其中高程为()高,而实际应用的高程系统为()高系统。正确答案: 大地,正常解析: 暂无解析 -
第10题:
单选题在高程应用方面GPS可以直接精确测定测站点的()A大地高
B正常高
C水准高
D海拔高
正确答案: A解析: 暂无解析 -
第11题:
单选题GPS测量数据处理,以获得地面测站点的()为目标A绝对高程
B平面坐标
C相对高程
D三维坐标
正确答案: A解析: 暂无解析 -
第12题:
填空题利用GPS直接测定的高程是GPS点在WGS-84坐标系中的()高。正确答案: 大地解析: 暂无解析 -
第13题:
关于工程测量高程控制网的施测方法.下列说法不正确的是()。A:水准测量是目前精度最高的建立高程控制网的施测方法
B:因为工程控制网精度要求较高,高程控制网应使用GPS测量的方法进行
C:四等及以下等级可采用电磁波测距三角高程测量
D:二等及以下等级可采用GPS拟合高程测量
E:图根水准测量可以采用GPS拟合高程测量答案:B,D解析:因为工程控制网精度要求较高,通常的高程控制网应使用水准测量的方法进行,四等及以下等级可采用GPS拟合高程测量或电磁波测距三角高程测量。故选BD。 -
第14题:
GPS测定某点的大地高程误差为±6mm,水准测定该点的高程误差为±8mm,则利用GPS水准计算该点的高程异常中误差为()mm。A:±6
B:±8
C:±10
D:±14答案:C解析:在未考虑水准观测起算误差的情况下如设GPS测定的大地高误差为mG;水准测定的高程误差为mS,则GPS水准点计算的高程异常中误差为 。
。 -
第15题:
在GPS高程应用方面,以下说法正确的是()
AGPS直接得到的是大地高
B高程精度比平面精度差
CGPS高程拟合的目的是为了得到正高
DGPS高程加上高程异常为正常高
A,B,D
略 -
第16题:
控制测量是指在测区内选定若干起控制作用的点构成控制网并精确测定这些点的平面位置和高程。
正确答案:正确 -
第17题:
控制测量,是指在测区内选定若干起控制作用的点构成控制网,并精确测定这些控制点的平面位置和高程
正确答案:错误 -
第18题:
GPS网一般是求得测站点的三维坐标,其中高程为大地高,而实际应用的高程系统为()高系统。
正确答案:正常 -
第19题:
在一个测区作业时,其高程系统()
- A、可以采用不同的高程基准
- B、可以采用不同的观测方法但基准必须统一
- C、不允许使用三角高程方法测定点位高程
- D、56高程系和85高程系可以混用,但不能与独立高程系混用
正确答案:B -
第20题:
单选题测设己知高程点是指()。A根据己有水准点高程,测定待测点高程
B测定两固定点间高差
C根据己有水准点高程,测设出给定的高程的标志
D测定视线高程
正确答案: A解析: 暂无解析 -
第21题:
单选题当GPS应用于水准测量时()AGPS方法可直接测定两点间的水准高差
BGPS方法可直接测定待定点的水准高程
C由于大地水准面异常的存在,GPS相对定位方法测得的大地高差必须经过高程异常改正才能得到待定点的水准高程
D大地水准面模型只能采用全球通用的EGM2008模型
正确答案: A解析: 暂无解析 -
第22题:
多选题在GPS高程应用方面,以下说法正确的是()AGPS直接得到的是大地高
B高程精度比平面精度差
CGPS高程拟合的目的是为了得到正高
DGPS高程加上高程异常为正常高
正确答案: A,C解析: 暂无解析 -
第23题:
填空题GPS网一般是求得测站点的三维坐标,其中高程为大地高,而实际应用的高程系统为()高系统。正确答案: 正常解析: 暂无解析