
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。A:3 B:4 C:5 D:6
题目
B:4
C:5
D:6
相似考题
更多“工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。”相关问题
-
第1题:
下列不属于机器人按机械结构类型分类的是()。A、直角坐标式机器人
B、圆柱坐标式机器人
C、球坐标式机器人
D、点位控制试标式机器人
参考答案:D
-
第2题:
工业机器人的基本参数有哪些()A、自由度数目的确定
B、作业范围的确定
C、运动速度的确定
D、承载能力的确定
参考答案:A,B,C,D
-
第3题:
下图中的4个工业机器人,()代表的是球坐标示机器人。
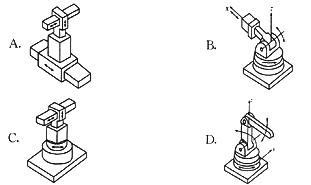
A.
B.
C.
D.
正确答案:B
-
第4题:
()主体结构具有三个自由度:腰转,升降,手臂伸缩。A直角坐标机器人
B圆柱坐标式机器人
C球面坐标式机器人
D关节坐标式机器人
参考答案:B
-
第5题:
参数6Kg表示工业机器人的哪项?( )A.型号
B.运动范围
C.自由度
D.承载能力
参考答案:D
-
第6题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。
A.3
B.4
C.5
D.6
正确答案:A
-
第7题:
工业机器人主要参数包括( )。A.自由度数
B.工作空间
C.承载能力
D.结构形式
答案:ABC
-
第8题:
工业机器人按照坐标形式分为( )。
A.圆柱坐标式
B.直角坐标式
C.空间坐标式
D.球坐标式
E.关节坐标式
正确答案:ABDE
-
第9题:
ROMAT工业机器人由6个自由度组合而成,可分为3个定位自由度、()自由度。
正确答案:3个角度定向 -
第10题:
机器人的自由度数目就是机器人所具有独立坐标轴运动的数目。
正确答案:正确 -
第11题:
对于只进行二维平面作业的工业机器人只需()自由度,若要使操作具有随意的位姿,则工业机器人至少需要六个自由度。而对于回避障碍作业的工业机器人则需要有比()自由度更多的冗余自由度。
正确答案:三个;六个 -
第12题:
多选题工业机器人按机械结构类型分类分为()。A关节型机器人
B球坐标型机器人
C圆柱坐标型机器人
D直角坐标型机器人
E检测机器人
正确答案: B,D解析: 暂无解析 -
第13题:
机器人按机械结构类型分为()。A、直角坐标式机器人
B、圆柱坐标式机器人
C、球坐标式机器人
D、平面坐标式机器人
参考答案:ABCD
-
第14题:
机器人的自由度是指机器人所具有的独立坐标轴运动的数目,其中包括末端操作器的开合自由度。()此题为判断题(对,错)。
参考答案:错误
-
第15题:
自由度是指机器人所有具有的独立坐标轴运动的数目,不包括末端操作器的开合自由度。()
参考答案:对
-
第16题:
下列4个工业机器人的运动简图中,( )代表的是球坐标式机器人。
A.
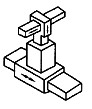
B.
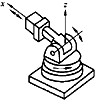
C.

D.
 正确答案:B
正确答案:B
解析:本题考核要点是工业机器人的分类。要求依据给定的图示进行简单判别。球坐标式(代号RRP)又称极坐标式,机器人手臂的运动由一个直线运动和两个转动组成。 -
第17题:
工业机器人按机械结构类型分为关节型机器人.().圆柱坐标型机器人.直角坐标型机器人等类型。
A.球坐标型机器人
B.焊接机器人
C.水下机器人
D.搬运机器人
正确答案:A
-
第18题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。 A.3B.4C.5 D.6
正确答案:A
-
第19题:
工业机器人运动自由度数,一般( )。
A.小于2个
B.小于3个
C.小于6个
D.大于6个
正确答案:C
-
第20题:
工业机器人运动自由度数一般( )。A:小于2个
B:小于3个
C:小于6个
D:大于6个答案:C解析:自由度数表示机器人动作的灵活程度;机器人的自由度一般少于6个,也有多于6个的。 -
第21题:
工业机器人的自由度一般是4~6个。
正确答案:正确 -
第22题:
对于只进行二维平面作业的工业机器人只需要三自由度,若要使操作具有随意的位置,则工业机器人需要()自由度。
- A、四个
- B、五个
- C、六个
- D、八个
正确答案:C -
第23题:
填空题对于只进行二维平面作业的工业机器人只需()自由度,若要使操作具有随意的位姿,则工业机器人至少需要六个自由度。而对于回避障碍作业的工业机器人则需要有比()自由度更多的冗余自由度。正确答案: 三个,六个解析: 暂无解析 -
第24题:
单选题对于只进行二维平面作业的工业机器人只需要三自由度,若要使操作具有随意的位置,则工业机器人需要()自由度。A四个
B五个
C六个
D八个
正确答案: A解析: 暂无解析